Using image recognition in complex handling applications with robots

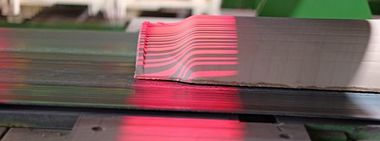
The increasing automation of clay brick and tile production plants with robot systems for handling applications requires a wider use of vision systems for a flexible and smooth production flow. This begins with two-dimensional recognition of the position and rotation of the moving clay bricks or roofing tiles, which are transported unmixed, but not correctly aligned on a conveyor. In the case of mixed settings, the vision system must also recognize the different products and control the sorting from the conveyor. The requirements for the system increase up to the determination of the coordinates (X, Y, Z) and angle of rotation (W, P, R) of a component in the space as well as the transfer of this data to the robot.
Goal of the talk is to provide an insight into the combined action of vision and robot systems with reference to current automation examples.
Peter Friedrich, Hans Lingl Anlagenbau und Verfahrenstechnik GmbH & Co.KG